









Gracias.
Su mensaje ha sido enviado.
Procesaremos su solicitud y nos pondremos en contacto con usted lo antes posible.
El formulario se ha enviado correctamente.
Encontrará más información en su buzón.
 Contrátanos
ContrátanosSeleccionar idioma

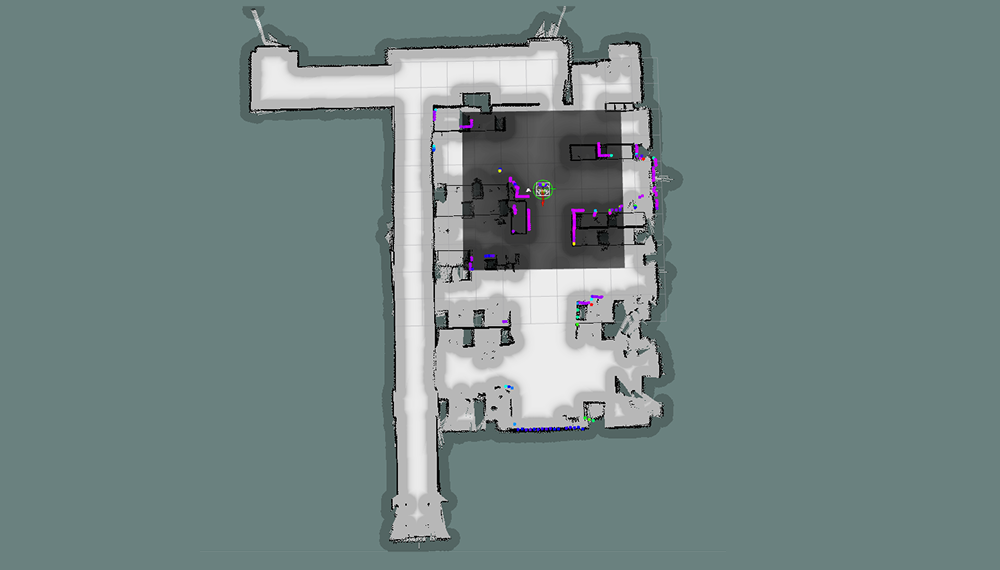
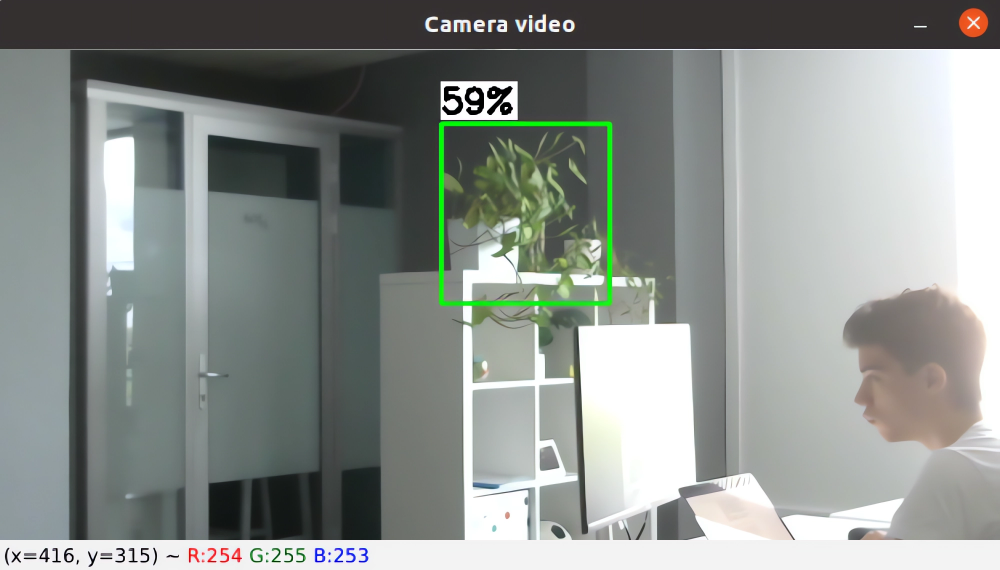



Lo que más me llevo de IRIS es que la robótica de oficina depende de pequeñas decisiones de ingeniería. Un robot puede tener una buena ruta en el mapa, pero la verdadera prueba empieza cuando se mueve cerca de escritorios, estanterías, personas y plantas colocadas a diferentes alturas. Este proyecto nos empujó a pensar en el comportamiento, la mecánica, los sensores y el software como un solo sistema, porque un eslabón débil cambia todo el resultado.