









Merci !
Votre message a été envoyé.
Nous traiterons votre demande et vous contacterons dès que possible.
Le formulaire a été soumis avec succès.
Vous trouverez de plus amples informations dans votre boîte aux lettres.
 Nous recruter
Nous recruterSélection de la langue

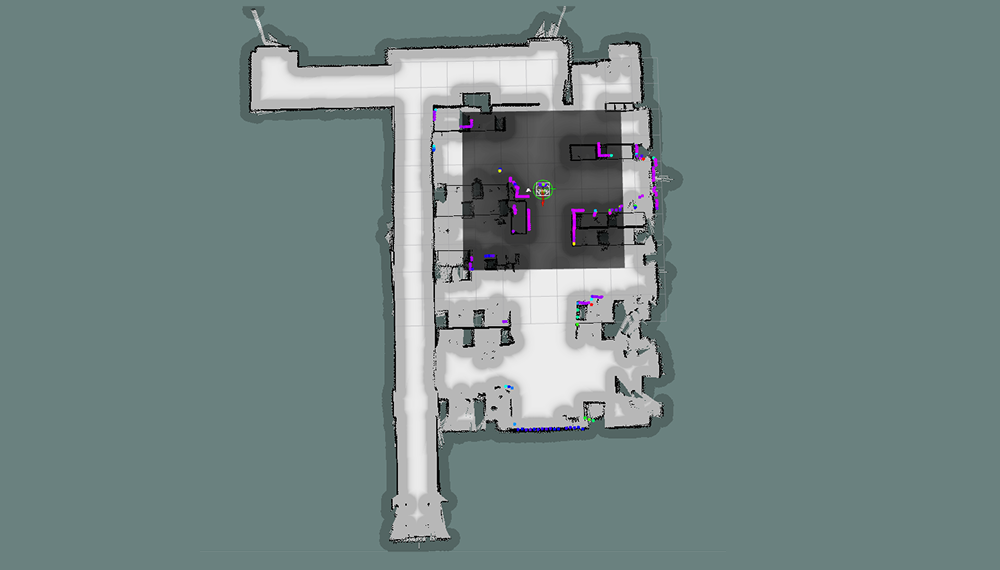
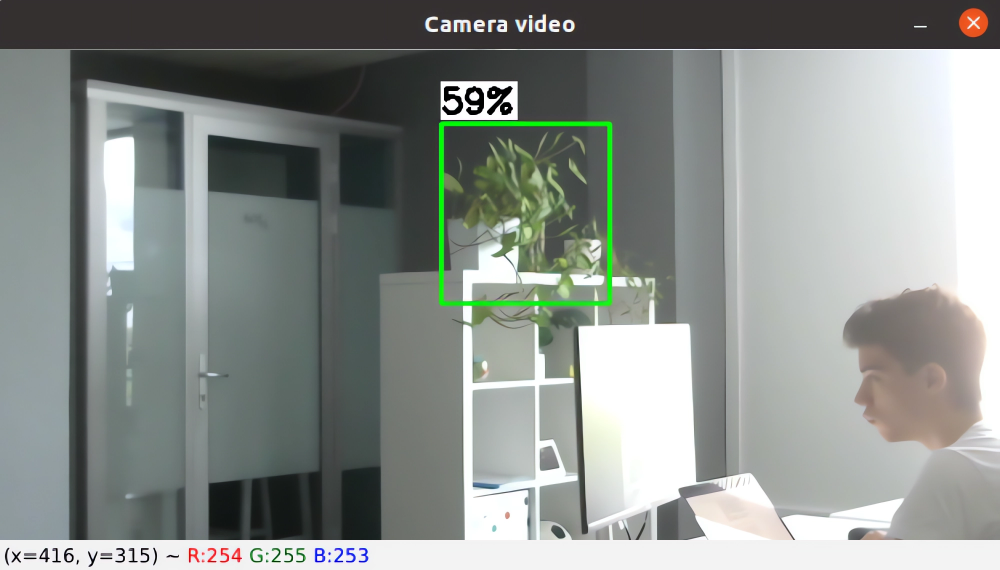



Ce que je retiens d'IRIS, c'est que la robotique de bureau dépend de petites décisions techniques. Un robot peut avoir un bon itinéraire sur la carte, mais le véritable test commence lorsqu'il se déplace à proximité de bureaux, d'étagères, de personnes et de plantes placées à différentes hauteurs. Ce projet nous a poussés à considérer le comportement, la mécanique, les capteurs et le logiciel comme un seul système, car un seul maillon faible modifie l'ensemble du résultat.