









Grazie!
Il tuo messaggio è stato inviato.
Elaboreremo la vostra richiesta e vi ricontatteremo al più presto.
Il modulo è stato inviato con successo.
Ulteriori informazioni sono contenute nella vostra casella di posta elettronica.
 Assumeteci
AssumeteciSelezionare la lingua

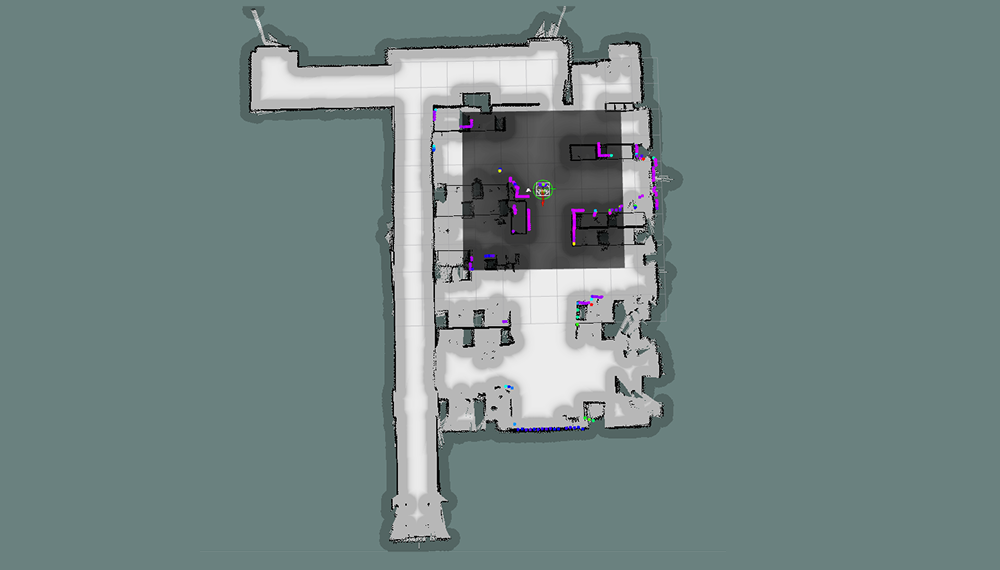
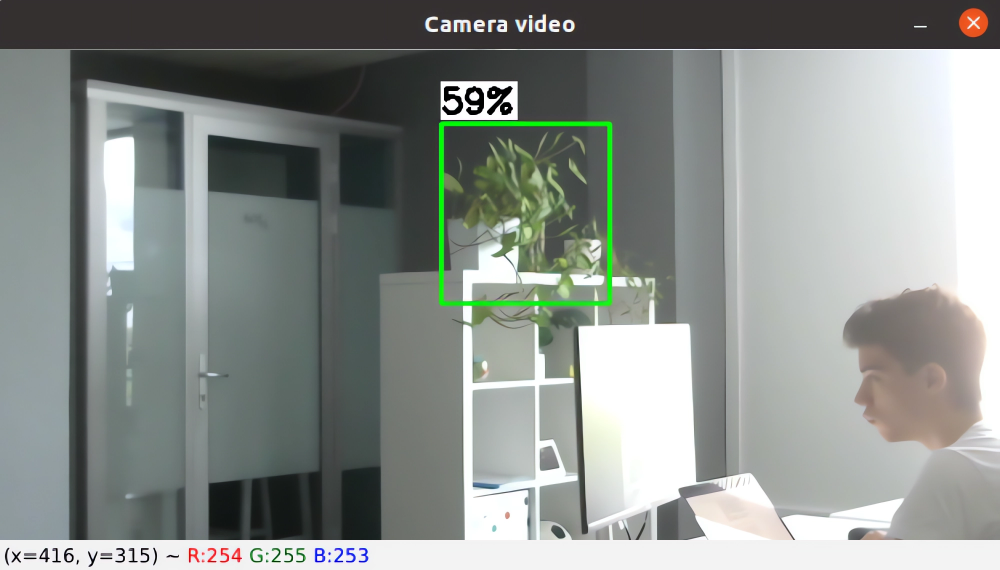



Il mio principale risultato di IRIS è che la robotica da ufficio dipende da piccole decisioni ingegneristiche. Un robot può avere un buon percorso sulla mappa, ma il vero test inizia quando si muove vicino a scrivanie, scaffali, persone e piante poste a diverse altezze. Questo progetto ci ha spinto a pensare al comportamento, alla meccanica, ai sensori e al software come a un unico sistema, perché un anello debole cambia l'intero risultato.