









Thank you!
Your message has been sent.
We’ll process your request and contact you back as soon as possible.
The form has been successfully submitted.
Please find further information in your mailbox.
 Hire us
Hire usSelect language

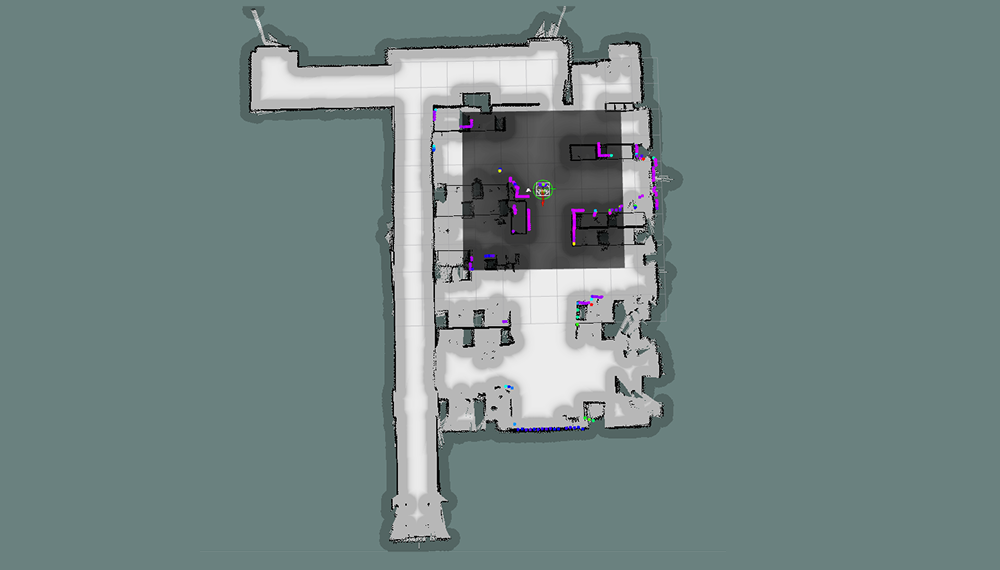
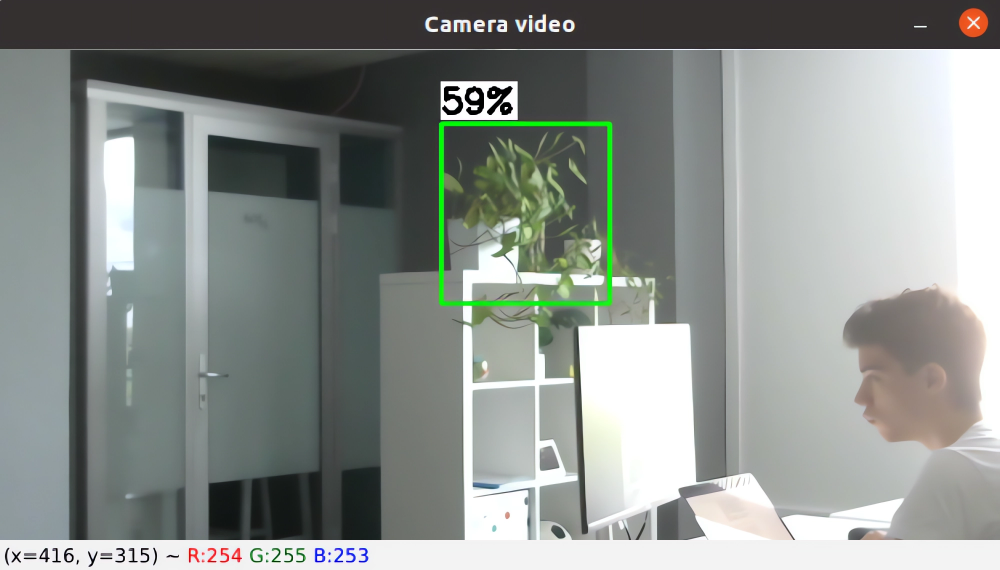



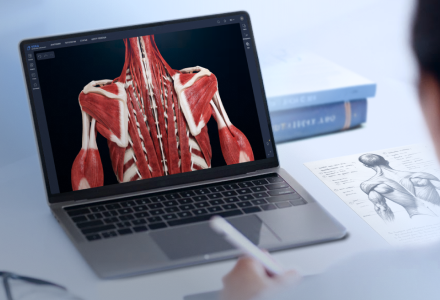
My main takeaway from IRIS is that office robotics depends on small engineering decisions. A robot can have a good route on the map, but the real test starts when it moves near desks, shelves, people, and plants placed at different heights. This project pushed us to think about behavior, mechanics, sensors, and software as one system, because one weak link changes the whole result.