









Tack!
Ditt meddelande har skickats.
Vi behandlar din begäran och återkommer till dig så snart som möjligt.
Formuläret har skickats in framgångsrikt.
Ytterligare information finns i din brevlåda.
 Anlita oss
Anlita oss
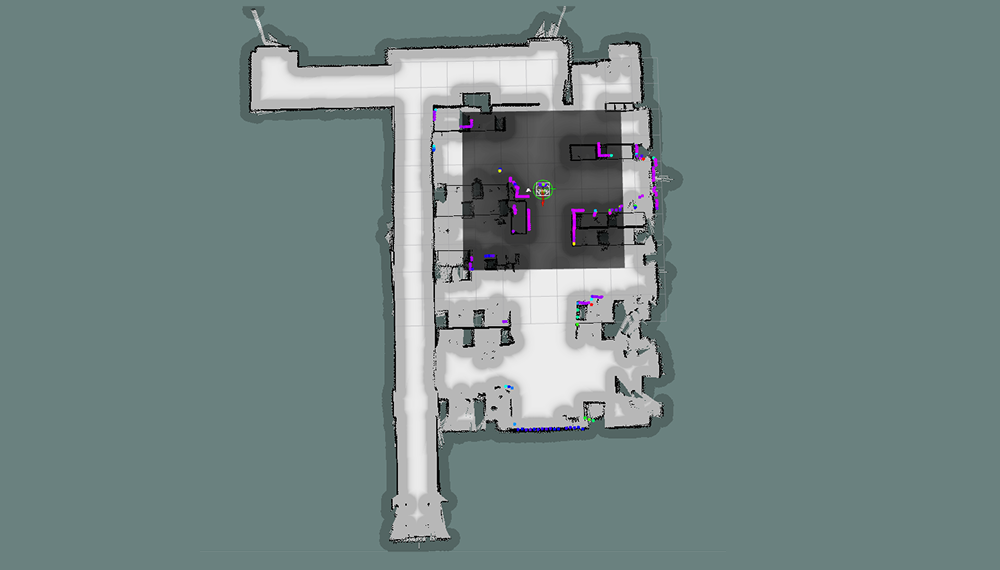
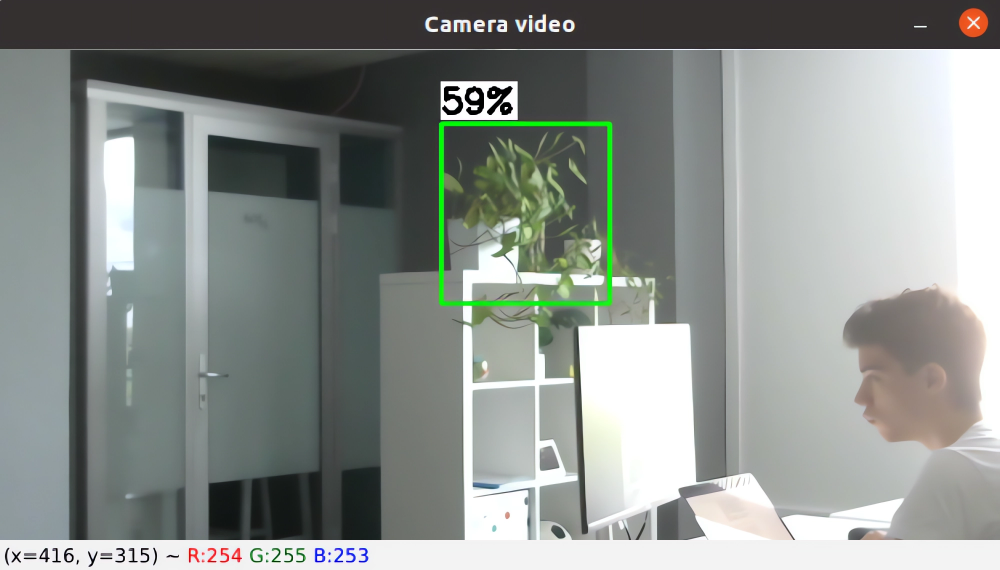



Det jag främst tog med mig från IRIS är att kontorsrobotik är beroende av små tekniska beslut. En robot kan ha en bra rutt på kartan, men det verkliga testet börjar när den rör sig nära skrivbord, hyllor, människor och växter som är placerade på olika höjder. Det här projektet tvingade oss att tänka på beteende, mekanik, sensorer och programvara som ett enda system, eftersom en svag länk förändrar hela resultatet.