









Obrigado!
A sua mensagem foi enviada.
Processaremos o seu pedido e contactá-lo-emos logo que possível.
O formulário foi enviado com sucesso.
Encontrará mais informações na sua caixa de correio.
 Contrate-nos
Contrate-nosSelecionar a língua

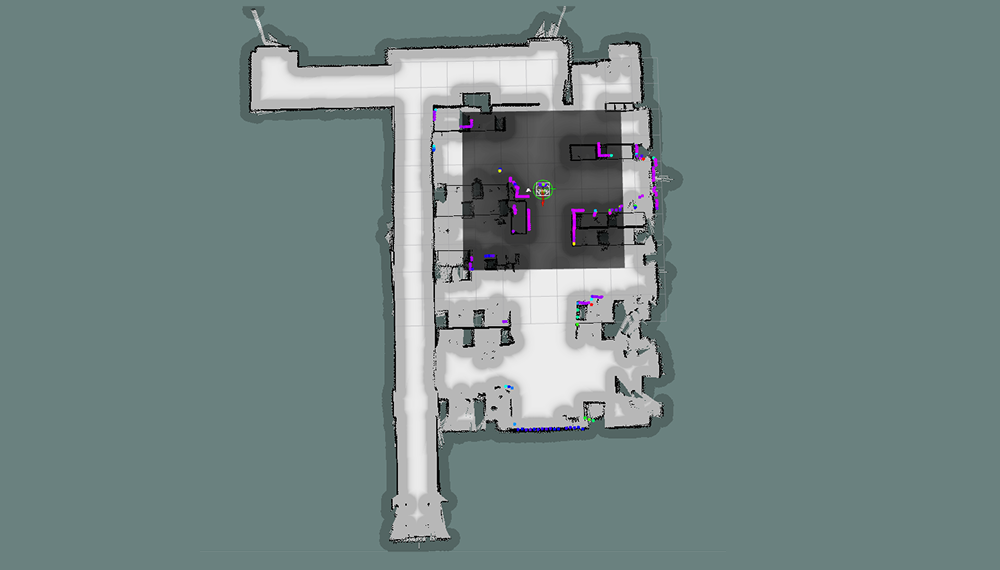
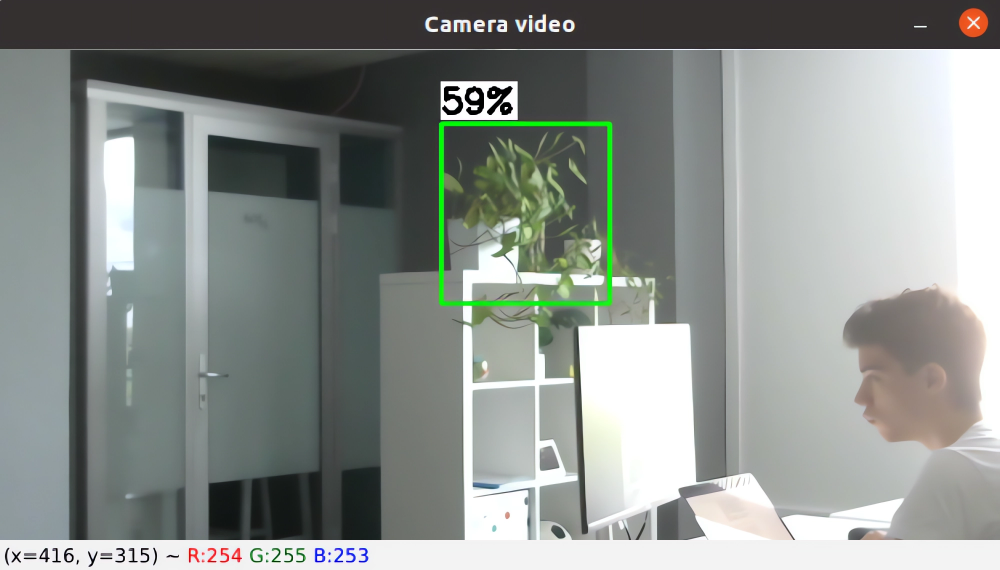



A minha principal conclusão do IRIS é que a robótica de escritório depende de pequenas decisões de engenharia. Um robô pode ter um bom percurso no mapa, mas o verdadeiro teste começa quando se desloca perto de secretárias, prateleiras, pessoas e plantas colocadas a diferentes alturas. Este projeto levou-nos a pensar no comportamento, na mecânica, nos sensores e no software como um sistema único, porque um elo fraco altera todo o resultado.