









Bedankt.
Uw bericht is verzonden.
We verwerken je aanvraag en nemen zo snel mogelijk contact met je op.
Het formulier is succesvol verzonden.
Meer informatie vindt u in uw mailbox.
 Inhuren
Inhuren
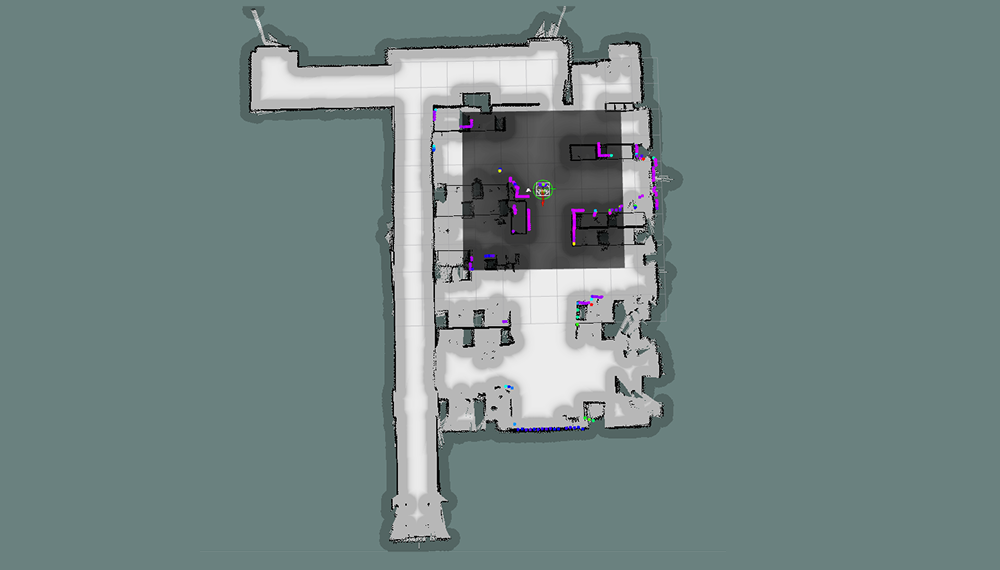
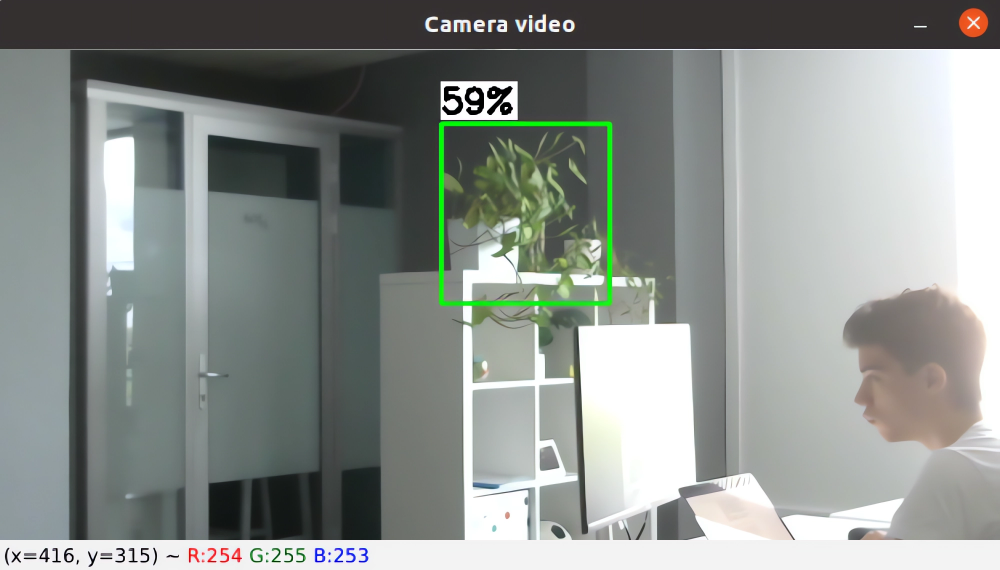



Mijn belangrijkste ervaring met IRIS is dat kantoorrobotica afhangt van kleine technische beslissingen. Een robot kan een goede route hebben op de kaart, maar de echte test begint wanneer hij beweegt in de buurt van bureaus, planken, mensen en planten op verschillende hoogtes. Dit project dwong ons om na te denken over gedrag, mechanica, sensoren en software als één systeem, omdat één zwakke schakel het hele resultaat verandert.