









Vielen Dank!
Ihre Nachricht wurde gesendet.
Wir werden Ihre Anfrage bearbeiten und uns so schnell wie möglich mit Ihnen in Verbindung setzen.
Das Formular wurde erfolgreich abgeschickt.
Weitere Informationen finden Sie in Ihrem Briefkasten.
 Einstellen
EinstellenSprache auswählen

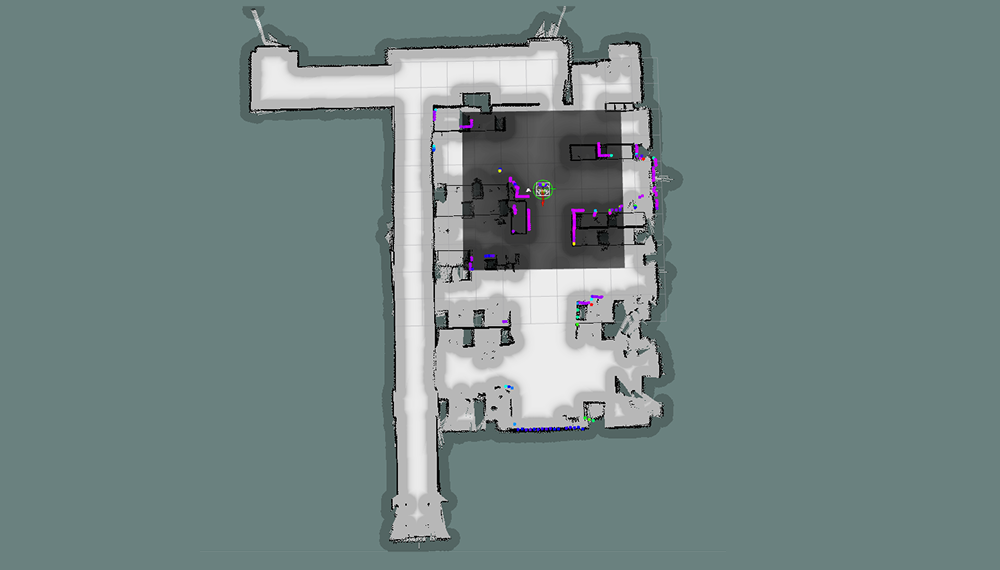
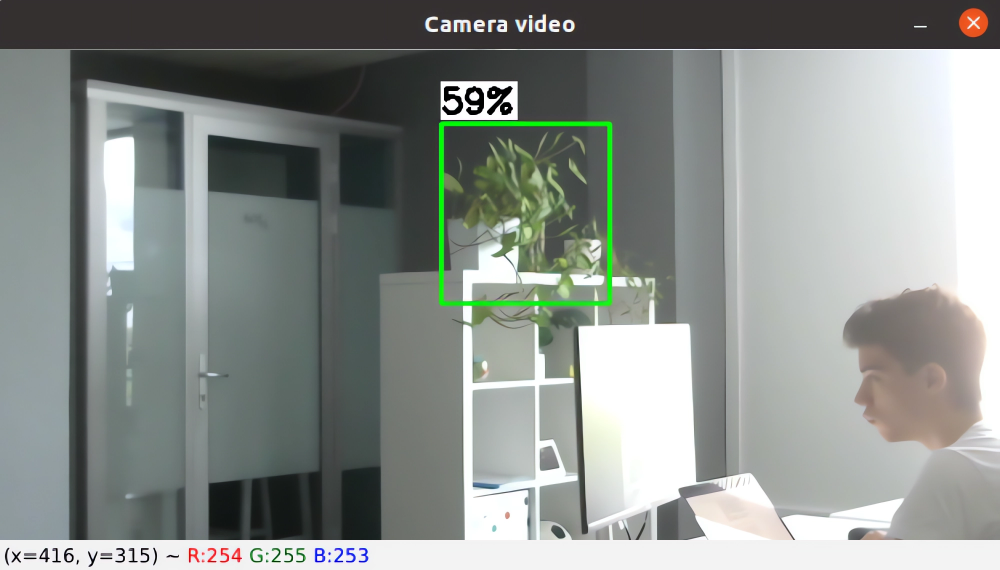



Meine wichtigste Erkenntnis aus IRIS ist, dass Bürorobotik von kleinen technischen Entscheidungen abhängt. Ein Roboter kann eine gute Route auf der Karte haben, aber der wirkliche Test beginnt, wenn er sich in der Nähe von Schreibtischen, Regalen, Menschen und Pflanzen in unterschiedlichen Höhen bewegt. Dieses Projekt hat uns dazu gebracht, Verhalten, Mechanik, Sensoren und Software als ein System zu betrachten, denn ein schwaches Glied verändert das gesamte Ergebnis.