








Dziękuję!
Wiadomość została wysłana.
Przetworzymy Twoją prośbę i skontaktujemy się z Tobą tak szybko, jak to możliwe.
Formularz został pomyślnie przesłany.
Więcej informacji można znaleźć w skrzynce pocztowej.

 Zatrudnij nas
Zatrudnij nas

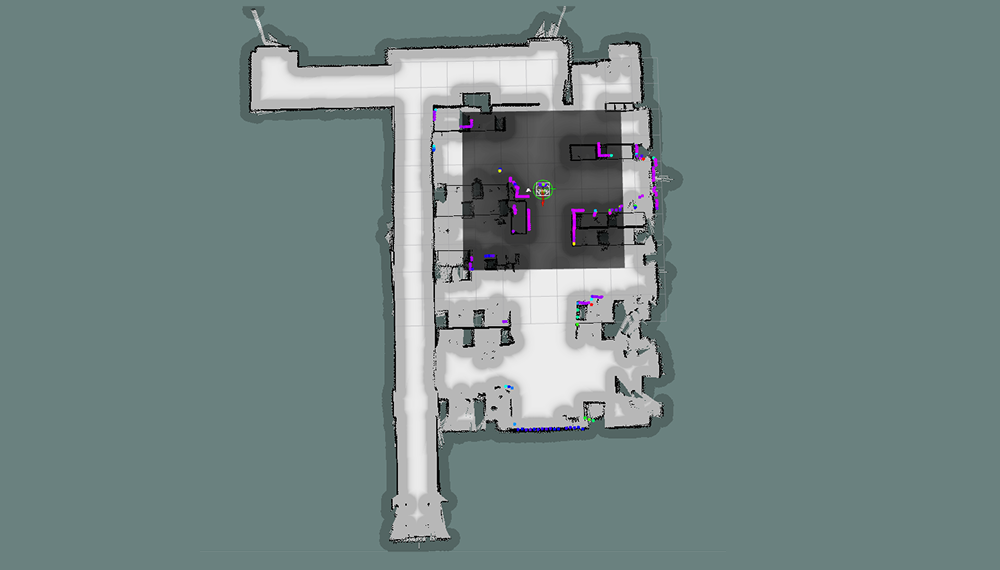
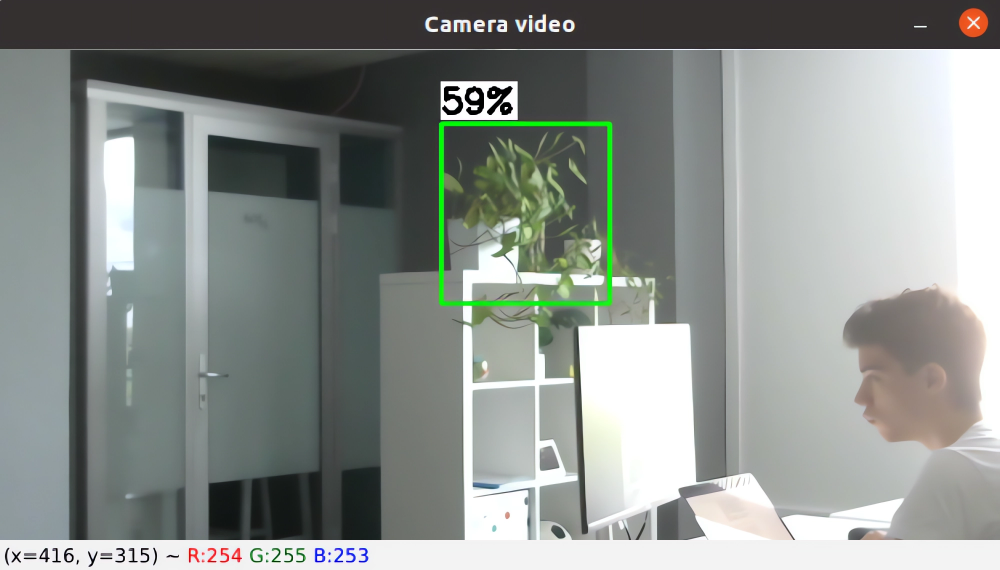



Moim głównym wnioskiem z IRIS jest to, że robotyka biurowa zależy od drobnych decyzji inżynieryjnych. Robot może mieć dobrą trasę na mapie, ale prawdziwy test zaczyna się, gdy porusza się w pobliżu biurek, półek, ludzi i roślin umieszczonych na różnych wysokościach. Ten projekt zmusił nas do myślenia o zachowaniu, mechanice, czujnikach i oprogramowaniu jako o jednym systemie, ponieważ jedno słabe ogniwo zmienia cały wynik.