 Zatrudnij nas
Zatrudnij nas

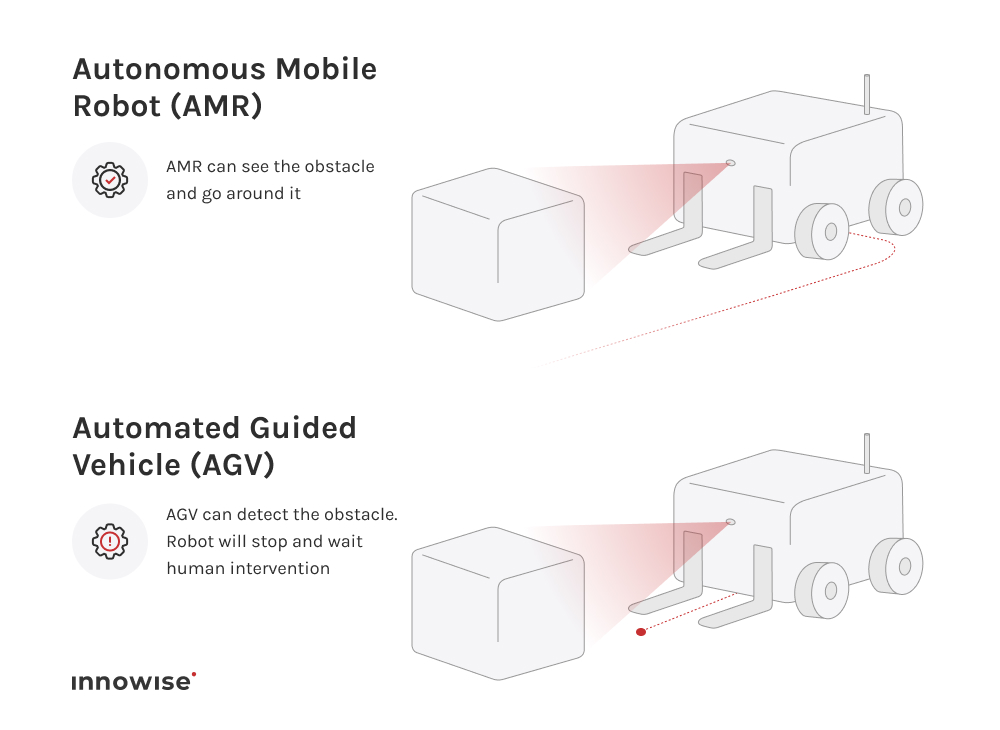
Roboty AGV kosztują mniej w przeliczeniu na robota, ale wymagają instalacji infrastruktury, która wydłuża czas i zwiększa koszty. Roboty AMR kosztują więcej z góry, ale można je szybko skonfigurować bez dodatkowej instalacji, więc całkowita cena będzie zależeć od tego, ile razy układ magazynu będzie modyfikowany w przyszłości.












Dziękuję!
Wiadomość została wysłana.
Przetworzymy Twoją prośbę i skontaktujemy się z Tobą tak szybko, jak to możliwe.

