 Nous recruter
Nous recruter

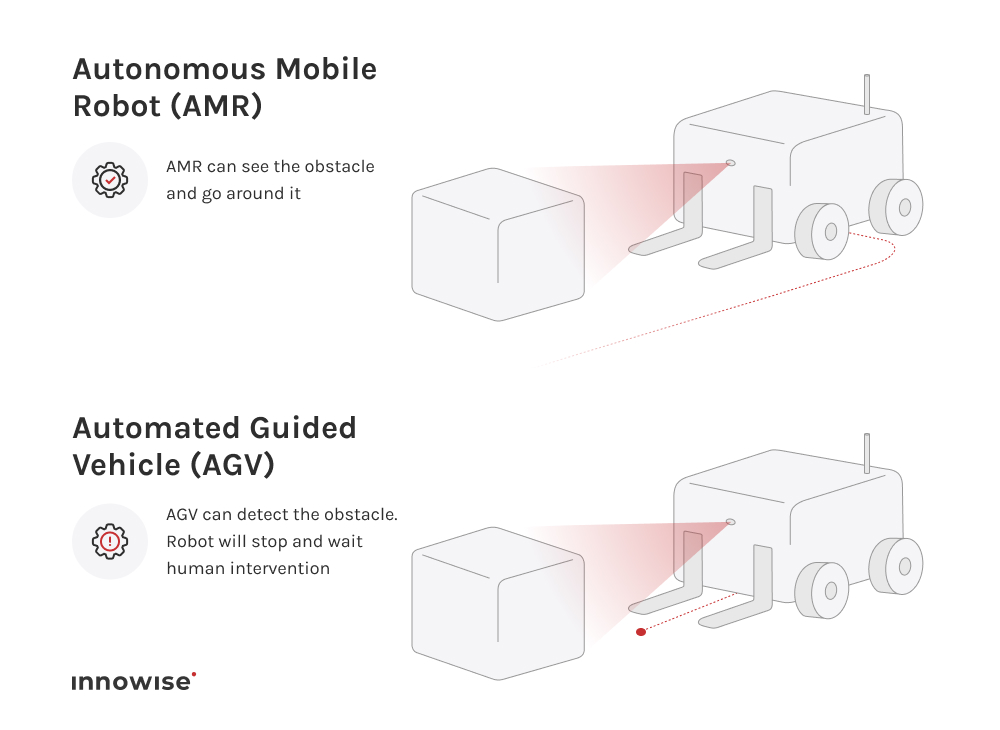
Les AGV coûtent moins cher par robot, mais nécessitent l'installation d'une infrastructure, ce qui représente des semaines et des dépenses supplémentaires. Les AMR coûtent plus cher au départ, mais ils peuvent être mis en place rapidement sans aucune installation supplémentaire. Le prix total dépendra donc du nombre de fois où l'agencement de votre entrepôt sera modifié à l'avenir.












Merci !
Votre message a été envoyé.
Nous traiterons votre demande et vous contacterons dès que possible.

