 Inhuren
Inhuren

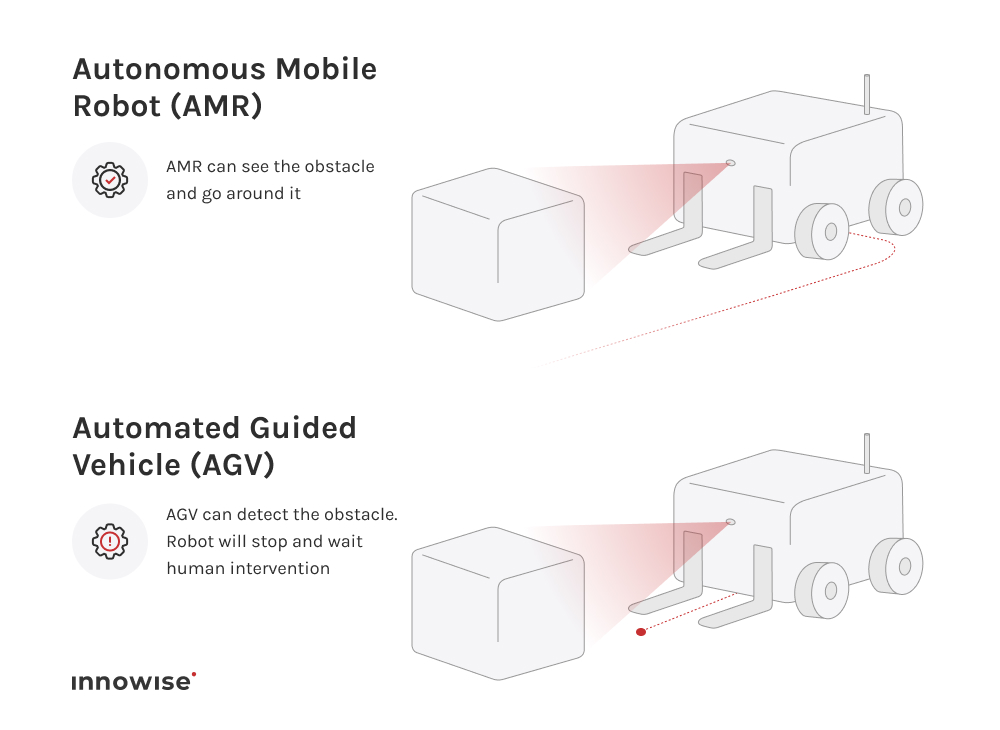
AGV's kosten minder per robot, maar vereisen een installatie van de infrastructuur die weken en extra kosten met zich meebrengt. AMR's kosten op voorhand meer, maar ze kunnen snel worden geïnstalleerd zonder bijkomende installatie, dus uw totale prijs zal afhangen van hoe vaak de lay-out van uw magazijn in de toekomst zal worden aangepast.












Bedankt.
Uw bericht is verzonden.
We verwerken je aanvraag en nemen zo snel mogelijk contact met je op.

