 Assumeteci
Assumeteci

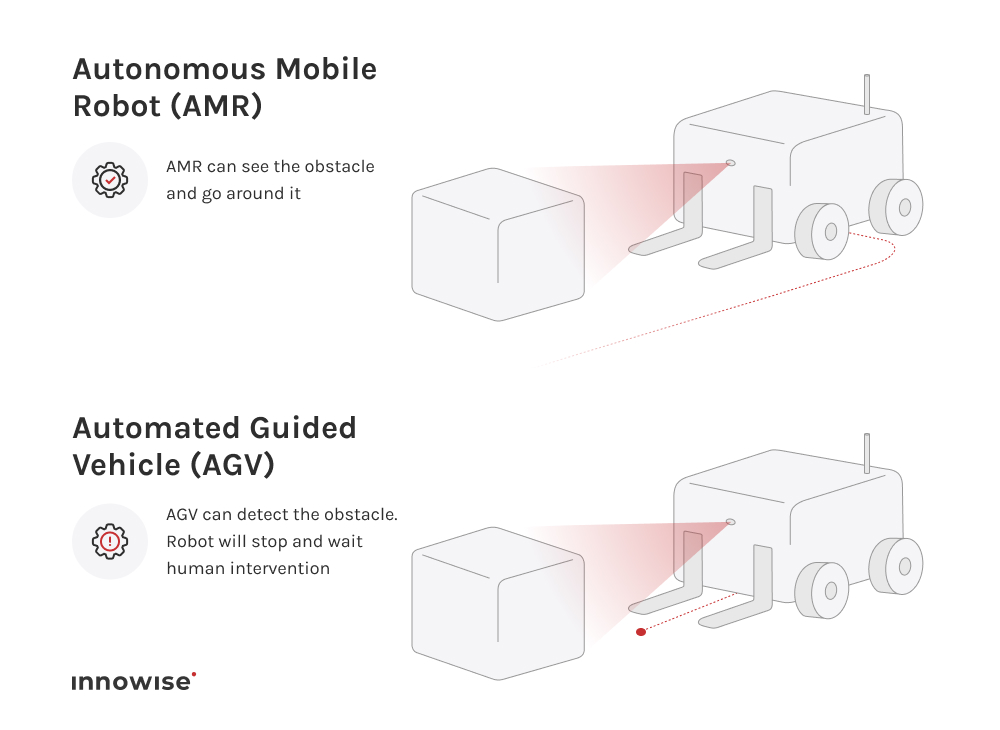
Gli AGV costano meno per robot, ma richiedono l'installazione di un'infrastruttura che aggiunge settimane e costi. Gli AMR costano di più all'inizio, ma possono essere installati rapidamente senza alcuna installazione aggiuntiva, quindi il prezzo totale dipenderà da quante volte il layout del magazzino verrà modificato in futuro.












Grazie!
Il tuo messaggio è stato inviato.
Elaboreremo la vostra richiesta e vi ricontatteremo al più presto.

