 Contrátanos
Contrátanos

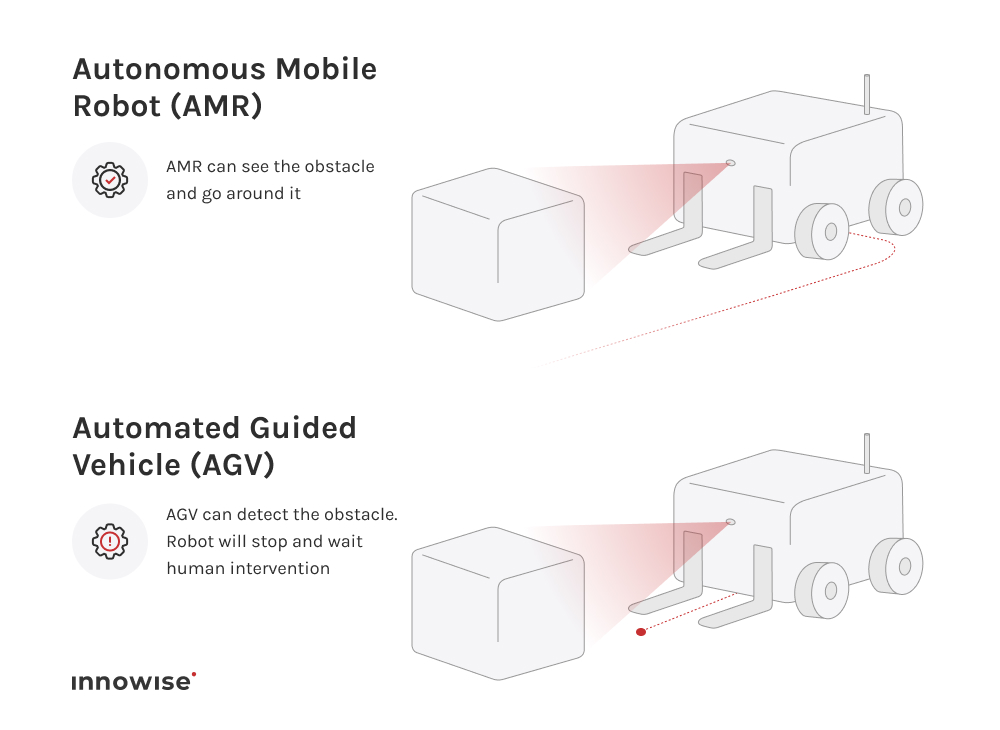
Los AGV cuestan menos por robot, pero requieren una instalación de infraestructura que añade semanas y gastos. Los AMR cuestan más por adelantado, pero pueden configurarse rápidamente sin instalación adicional, por lo que el precio total dependerá de cuántas veces se modifique la distribución del almacén en el futuro.












Gracias.
Su mensaje ha sido enviado.
Procesaremos su solicitud y nos pondremos en contacto con usted lo antes posible.

