 Einstellen
Einstellen

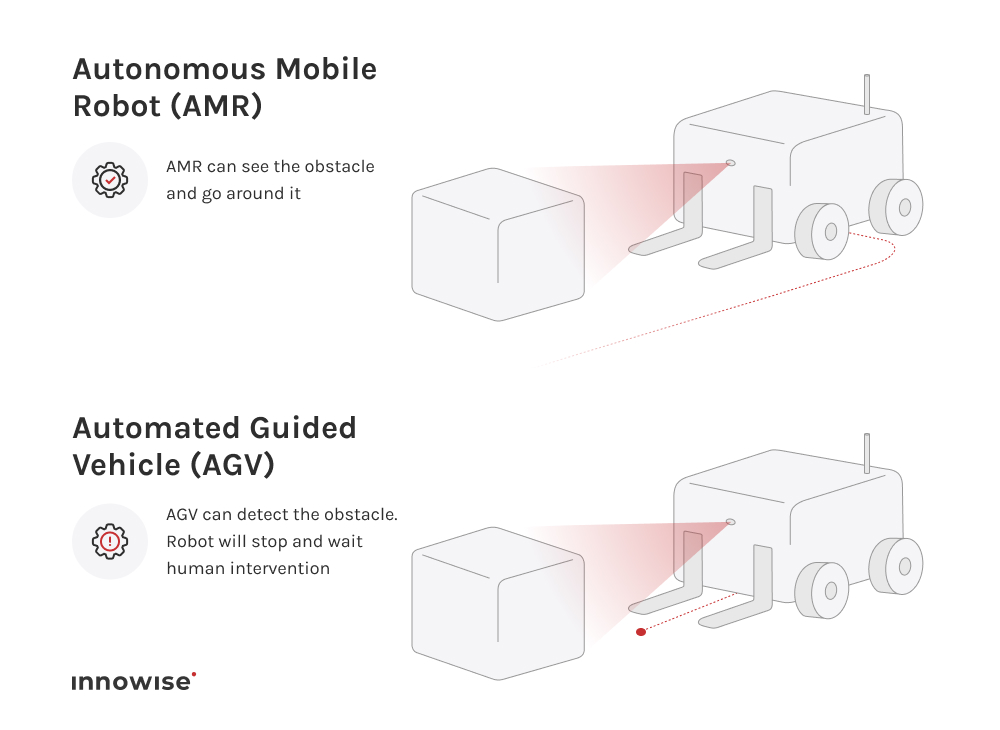
FTS kosten weniger pro Roboter, erfordern aber eine wochenlange und kostspielige Installation der Infrastruktur. AMRs kosten im Voraus mehr, können aber schnell und ohne zusätzliche Installation eingerichtet werden, sodass der Gesamtpreis davon abhängt, wie oft Ihr Lagerlayout in Zukunft geändert wird.












Vielen Dank!
Ihre Nachricht wurde gesendet.
Wir werden Ihre Anfrage bearbeiten und uns so schnell wie möglich mit Ihnen in Verbindung setzen.

