 Hire us
Hire us

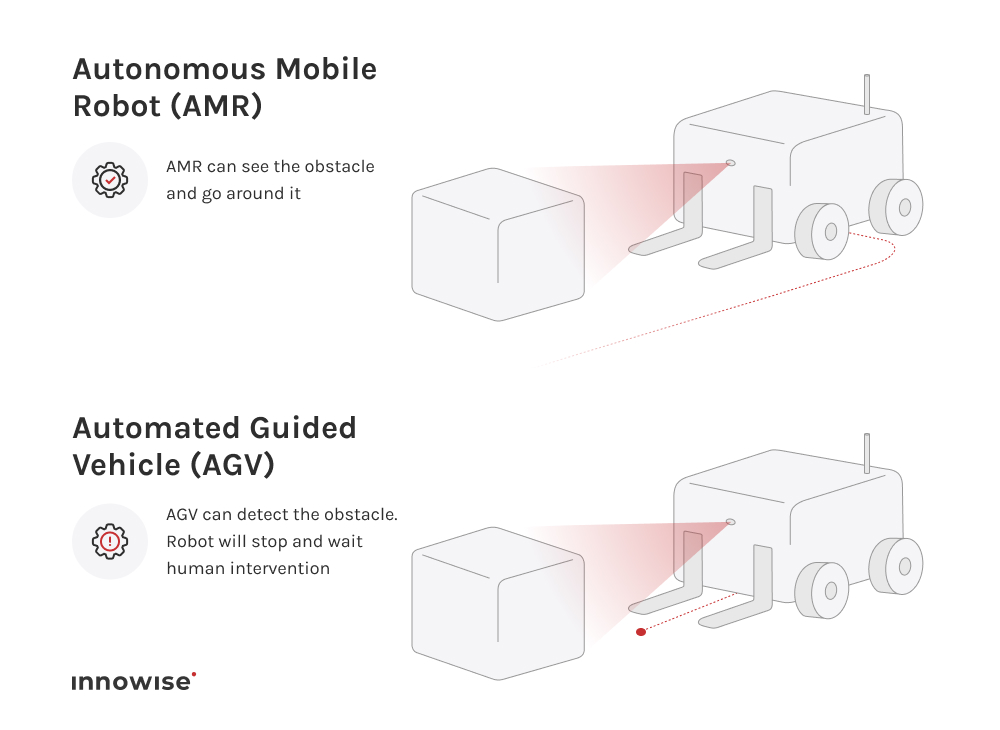
AGVs cost less per robot but require infrastructure installation that adds weeks and expense. AMRs cost more upfront, but they can be set up quickly without any additional installation, so your total price will depend on how many times your warehouse layout will be modified in the future.












Thank you!
Your message has been sent.
We’ll process your request and contact you back as soon as possible.

