 Contrate-nos
Contrate-nos

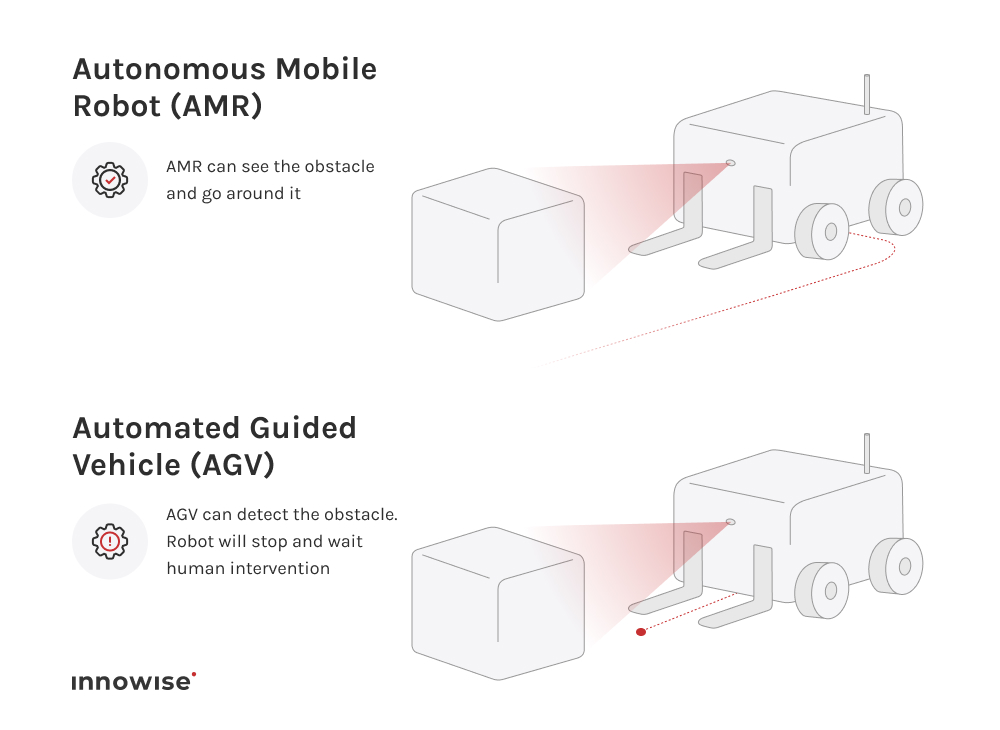
Os AGVs custam menos por robô, mas requerem a instalação de infra-estruturas, o que implica semanas e despesas adicionais. Os AMRs custam mais à partida, mas podem ser montados rapidamente sem qualquer instalação adicional, pelo que o seu preço total dependerá do número de vezes que a disposição do seu armazém será modificada no futuro.












Obrigado!
A sua mensagem foi enviada.
Processaremos o seu pedido e contactá-lo-emos logo que possível.

