 Anlita oss
Anlita oss
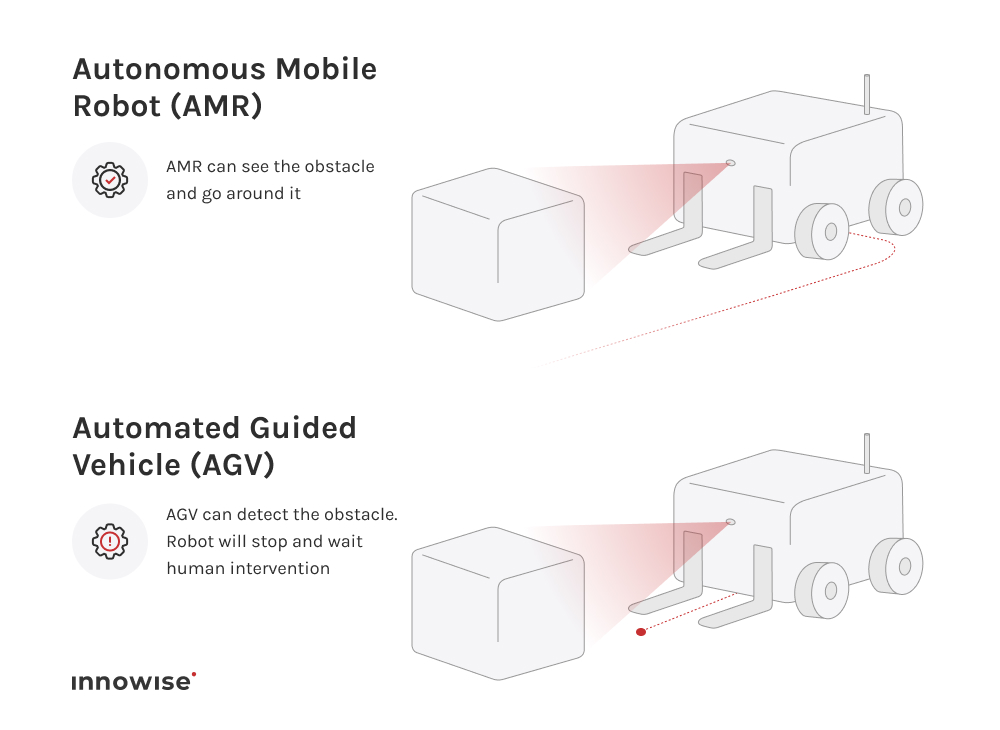
AGV:er kostar mindre per robot men kräver installation av infrastruktur som tar flera veckor och kostar mer. AMR:er kostar mer i början, men de kan installeras snabbt utan ytterligare installation, så totalpriset beror på hur många gånger lagerlayouten kommer att ändras i framtiden.













Tack!
Ditt meddelande har skickats.
Vi behandlar din begäran och återkommer till dig så snart som möjligt.
